Das Projekt
The project
Mit Juni 2019 startete das RoboCup@Work LFUI Team als standortübergreifendes Projekt der Universität Innsbruck. Das Team besteht aus Bachelor- und Masterstudierenden, sowie MitarbeiterInnen der Institute für Mechatronik, Informatik und Grundlagen der Technischen Wissenschaften. Zusätzlich wird das Team durch die Prof. Gerstmayr, Pfurner und Piater begleitet. Ein Austausch zwischen den unterschiedlichen Fachbereichen (Mechatronik, Informatik, Elektrotechnik) hat auf Studierendenebene bereits begonnen und soll noch weiter ausgebaut werden. Durch eine enge Anbindung an Lehrveranstaltungen der Robotik (Gerstmayr und Piater), sowie mehrerer Bachelor- und Masterarbeiten können Lehrinhalte rasch auf industrierelevante Problemstellungen angewandt werden.
In June 2019, the RoboCup@Work LFUI team started as a cross-location project of the University of Innsbruck. The team consists of bachelor and master students as well as employees of the institutes for mechatronics, computer science and basic technical sciences. Additionally, the team is accompanied by Prof. Gerstmayr, Pfurner and Piater. An exchange between the different faculties (mechatronics, computer science, electrical engineering) has already begun at student level and is to be further expanded. Due to a close connection to courses in robotics (Gerstmayr and Piater), as well as several bachelor and master theses, course contents can be quickly applied to problems relevant to industry.
Mechatronisches Design
Mechatronic design
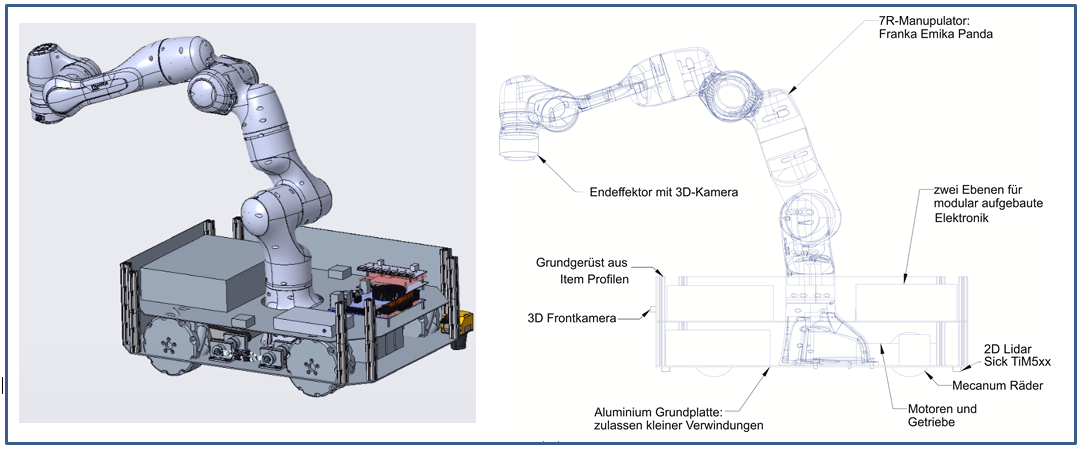
Das mechatronische Design (s. Abb. 1) der mobilen Roboterplattform ist weitestgehend abgeschlossen, sodass eine Umsetzung der mechatronischen Komponenten, sowie der Software im Fokus steht. Die Beschaffung stellt, wie in derartigen Systemen üblich, einen größeren Aufwand dar. Durch eine enge Kooperation des Campus Technik Lienz (Roboterarm) und des Campus Technik Innsbruck (mobile Plattform), konnte bereits ein beachtlicher Fortschritt erzielt und die Kooperation der beiden Standorte ausgebaut werden. Der außerhalb des Projektes angeschaffte, hochmoderne Roboterarm mit 7 Gelenksfreiheitsgraden wird sowohl im Projekt als auch in der Lehre eingesetzt.
The mechatronic design (see Fig. 1) of the mobile robot platform is largely completed, so that the focus is on implementing the mechatronic components and the software. The procurement, as usual in such systems, represents a major effort. Close cooperation between the Campus Technik Lienz (robotic arm) and the Campus Technik Innsbruck (mobile platform) has already led to considerable progress and the cooperation between the two locations has been expanded. The ultra-modern robot arm with 7 degrees of joint freedom, which was purchased outside the project, is used both in the project and in teaching.